Prix UPIAV
L’UPIAV soutient la heig-vd depuis quelques années et a eu le plaisir de remettre un prix, à :
M. Samuel SCHWYN pour son travail de Bachelor intitulé
« Utilisation de la caméra panoramique Ladybug »
Voici l’abstract de son travail :
La tête panoramique Ladybug 5+ qui fait l’objet de ce travail de Bachelor est composée de 6 caméras qui permettent d’acquérir des images 360°. Le but de ce projet est d’étudier la calibration ainsi que la synchronisation des capteurs en vue d’une utilisation intégrée dans un  système d’acquisition mobile.
système d’acquisition mobile.
Pour permettre d’effectuer des mesures précises, il faut des images sans déformation, positionnées et orientées dans un système de coordonnées. La calibration de la tête panoramique permet donc de déterminer les paramètres intrinsèques de chacune des 6 caméras qui la composent (focale, point principal d’autocollimation (PPA), coefficients de distorsion), mais également les bras de levier et les matrices de boresight (rotation) entre les différentes caméras.
Pour cela, un polygone d’étalonnage a été mis en place par le moyen de cibles en papier, dont les coordonnées 3D ont été définies à l’aide d’une station totale. Le géoréférencement des images acquises par la caméra panoramique a été rendu possible grâce à la mesure tachéométrique des quatre prismes fixés sur son socle. Dans le cas d’une acquisition en extérieur à l’aide d’un système mobile, le géoréférencement serait assuré par une antenne GNSS et une centrale inertielle.
L’étude des repères utilisés lors de la calibration a permis de calculer les bras de levier et les matrices de rotation nécessaires pour passer d’un système de référence à un autre. En partant de la formule de colinéarité, il a été possible de formuler le passage du repère de la caméra au repère terrain, en appliquant toutes les rotations et les bras de leviers qui y interviennent. Cette formule a alors été transposée de façon pratique dans le calcul de calibration à l’aide du logiciel Agisoft via une aérotriangulation en plusieurs étapes pour exporter finalement un fichier complet de calibration.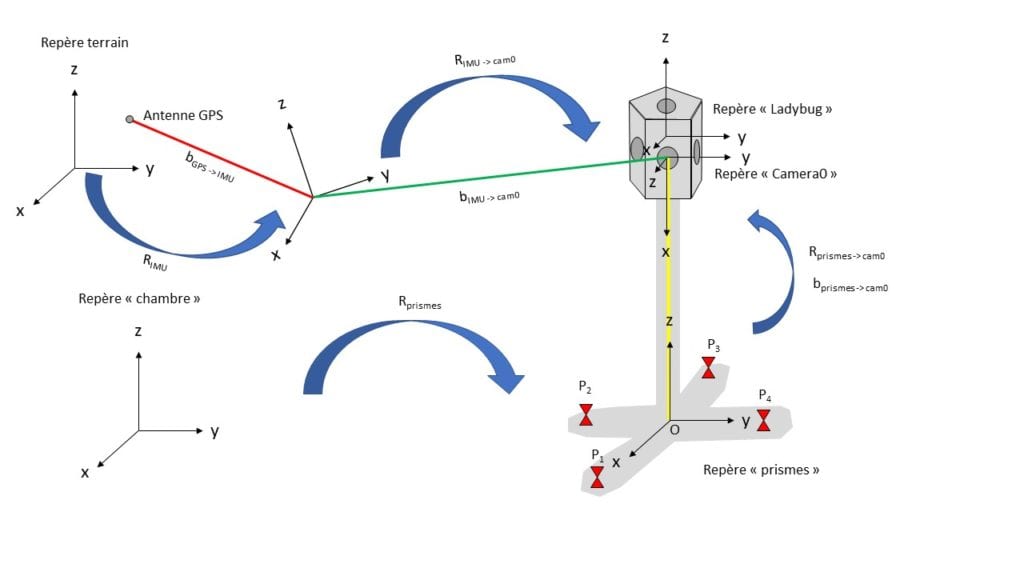
Afin de combiner les données photogrammétriques avec d’autres données issues des capteurs du système mobile (p. ex. LiDAR), il est primordial d’avoir une synchronisation temporelle parfaite entre les capteurs afin d’éviter des décalages entre les images et les nuages de points. Des tests ont ainsi été menés en collaboration avec la société Helimap System SA pour intégrer et synchroniser la caméra panoramique dans un système d’acquisition mobile.
Vous trouverez le rapport complet du travail de Bachelor sur la page web : http://tb.heig-vd.ch/7070.
Avec toutes nos félicitations pour cet excellent travail !